最後產出類模組化設定
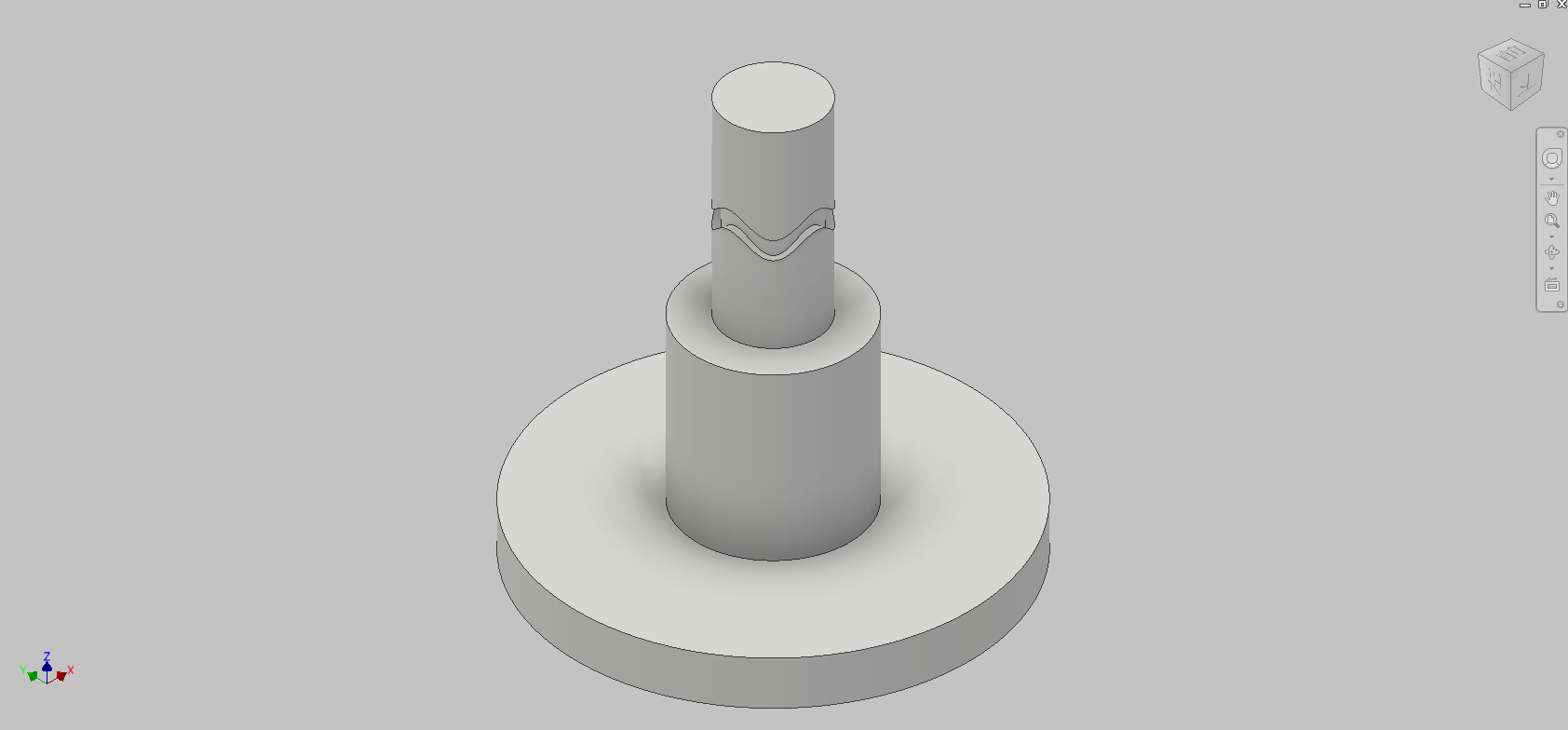
1.像這樣的凸輪上面有特製的紋路可供支架跑
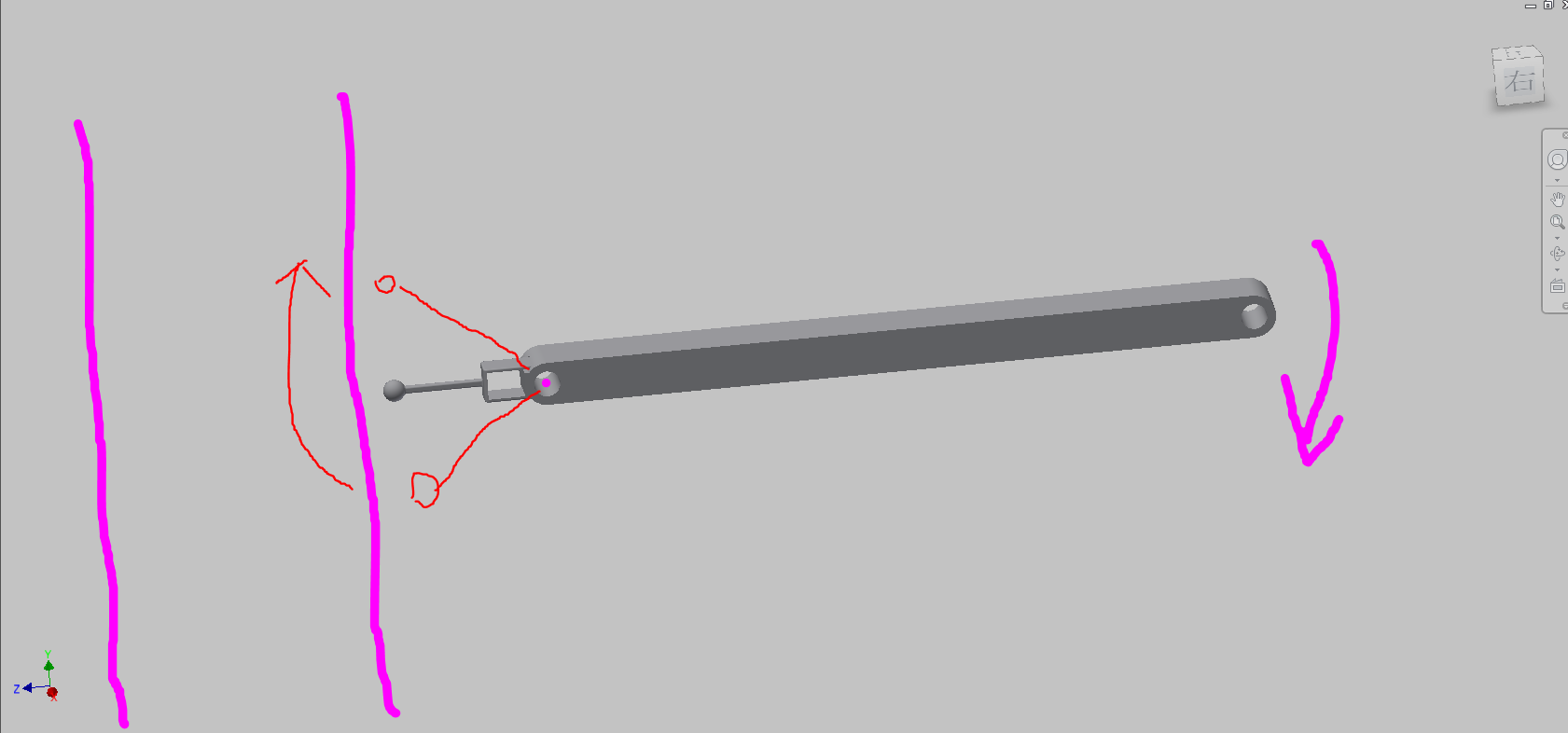
2.支架講解
支架在跑的時候會變成弧形,為了試驗他的弧形,刻意將桿子設計成可伸縮版本。
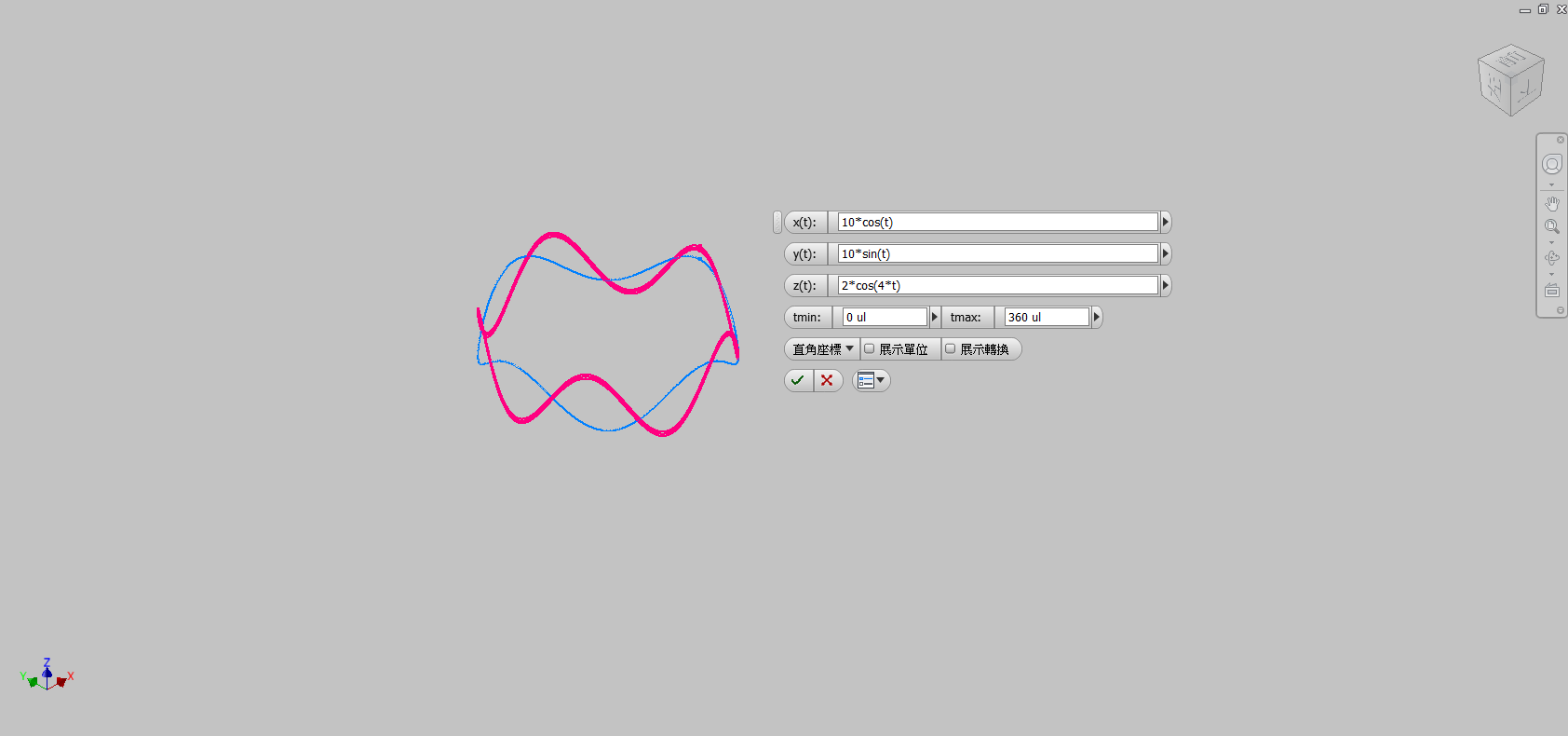
2.但是如果要隨時改動尺寸的話太不方便了!所以設計這一種可以隨時更動的曲線。藉由改波峰多寡和上下大小來完成各種不同的設計。
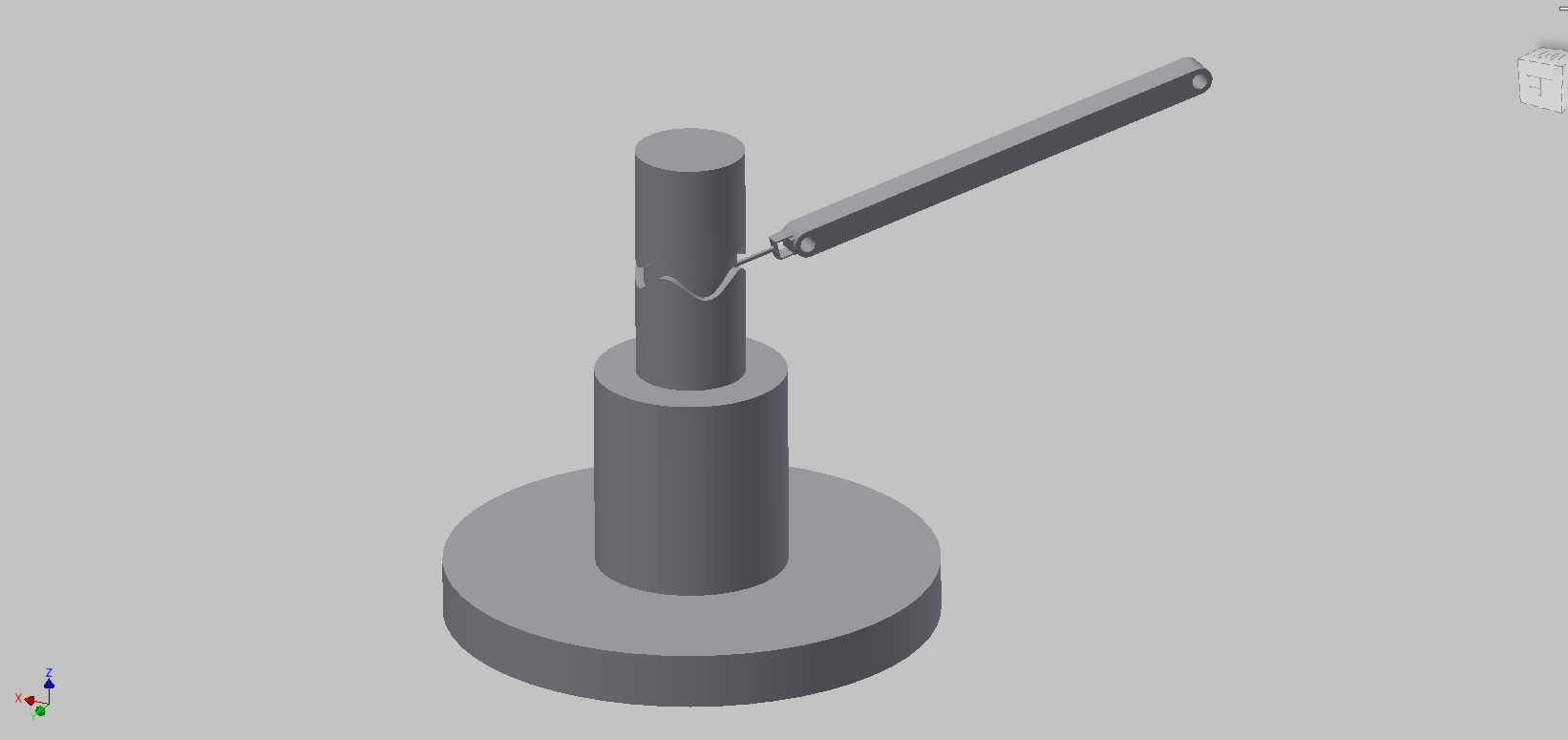
3.以下是總圖
4.講解影片
Copyright © All rights reserved | This template is made with by Colorlib